
Dr.-Ing. Oliver Urbann
Junior Research Group Leader AI & Robotics
Automation & Embedded Systems
Fraunhofer IML, Dortmund
- E-mail: oliver.urbann@gmail.com
- Website: bit.do/urbann
- Phone: +49 (0)231 9743-547










Education

TU Dortmund University
Dr.-Ing. Computer Science (Ph.D. equivalent, summa cum laude)
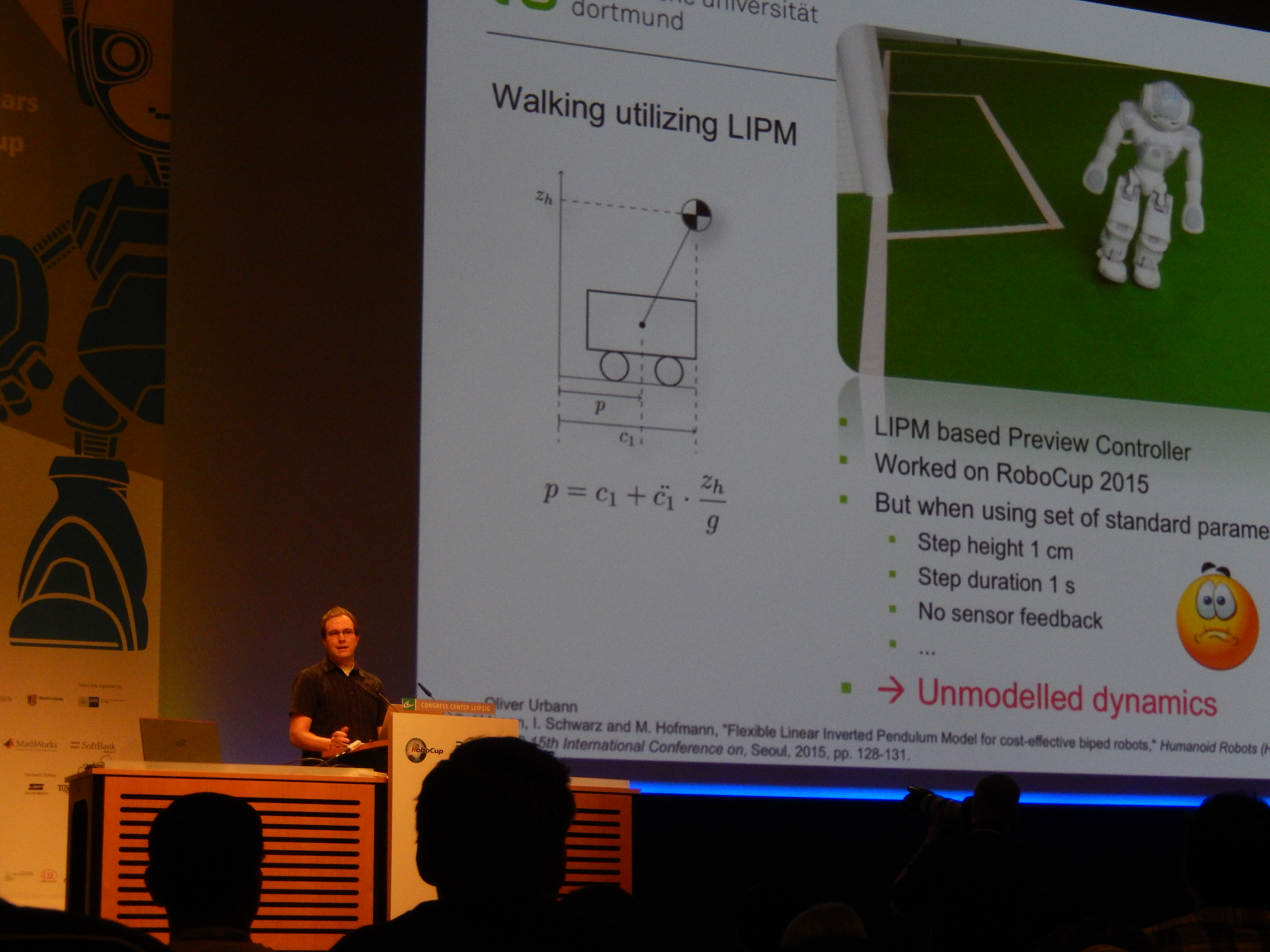
Walking of Humanoid Robots Based on Control Theory and Real-Time Reactive Stepping (german), keywords: Model Predictive and Preview Control, Observer
Jan. 2017
TU Dortmund University
Diplom Computer Science (M.Sc. equivalent)
Analysis and Compensation of Walk Related Effects on Biped Robots (german), keywords: Rigid Body Simulation, AI, Genetic Algorithms, Inverse Dynamics
2010
Experience

Junior Research Group Leader
Fraunhofer IML
Research in dynamic locomotion for biped robots, fast driving systems etc. utilizing machine learning approaches. More info...
2022-Now
Head of Machine Learning Team
Fraunhofer IML
Research and development of machine learning algorithms with application in autonomous robotics and image processing.
2019-Now
Deep Learning Engineer and Co-Founder
ViSenSys GmbH
Research and development of image processing algorithms using machine learning.
2017-2018
Team Leader Autonomous Robotics Group as Research Associate
Robotics Research Institute, TU Dortmund University
Research in the area of autonomous robotics and machine learning.
2010-2017
Student research assistant
Robotics Research Institute, TU Dortmund University
Development of robotic framework (Linux, C++)
2008-2010
Student research assistant
Leibniz Research Centre for Working Environment and Human Factors
Development of high-precision reactions tests (software and hardware, C# and C++), increased accuracy from 5 ms to 10 𝜇s.
2005-2008
PocketPC Development Freelancer
Development of PocketPC software in C/C++ for various companies.
2001-2004
Projects
(excerpt)
Junior Research Group AI
BMBF
Research in dynamic locomotion for biped robots, fast driving systems etc. utilizing machine learning approaches. More info...
2022-2025
Competence Center for Machine Learning Rhein-Ruhr (ML2R)
BMBF
Trustworthy, Hybrid, Resource-Aware and Quantum Machine Learning
2018-2023
Datenfabrik.NRW - Künstliche Intelligenz in der Produktion von morgen
BMBF
Optical tracking and Digital Twins in logistics and production.
2021-2025
Intelligent Motion Control under Industry4.E
EU, Horizon 2020
Intelligent vehicles and logistics in cooperation with KION.
2021-2024
Flexible Assembly Manufacturing with Human-Robot Collaboration and Digital Twin Models
EU, Horizon 2020
Optimization of human machine interaction and production utilizing Machine Learning.
2021-2025
AI-Arena
BMBF
Deep Reinforcement Learning for mobile autonomous robotcs and Machine Learning compiler for embedded systems.
2019-2022
Achievements

Best Paper Award Finalist
Int. Conf. on Control Automation Robotics Vision (ICARCV)
Selected as one of four finalists from 156 accepted papers: link.
2022
Best Presentation Award
IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS)
Awarded paper: link.
2020
Word Champion, SPL-Outdoor and 1st Place, Challenges
RoboCup Leipzig, Germany
2016
Most cited journal publication
Dortmund
"Observer-based dynamic walking control for biped robots" listed by Elsevier as one of the most cited publications of the journal since 2009. Please note that the site now lists later years.
2013
Vice World Champion
RoboCup Istanbul, Turkey
2011
Publications

Journal and Books
Guided Reinforcement Learning: A Review and Evaluation for Efficient and Effective Real-World Robotics
Julian Eßer, Nicolas Bach, Christian Jestel, Oliver Urbann, Sören Kerner, IEEE Robotics & Automation Magazine, IEEE, 2022 pp. 2-22
Artificial intelligence for hospital health care: Application cases and answers to challenges in european hospitals
Matthias Klumpp, Marcus Hintze, Milla Immonen, Francisco Ródenas-Rigla, Francesco Pilati, Fernando Aparicio-Martínez, Dilay Çelebi, Thomas Liebig, Mats Jirstrand, Oliver Urbann, Marja Hedman, Jukka A Lipponen, Silvio Bicciato, Anda-Petronela Radan, Bernardo Valdivieso, Wolfgang Thronicke, Dimitrios Gunopulos, Ricard Delgado-Gonzalo, Healthcare, MDPI, 2021/8, 9, pp. 961-
Anwendungsfelder von künstlicher Intelligenz in Industrie-4.0-Systemen
Sören Kerner, Jens Leveling, Oliver Urbann, Luise Weickhmann, Maximilian Otten, Maurice Vogel, Handbuch Industrie 4.0, Springer, 2020, pp. 227-250
Observer-based biped walking control, a sensor fusion approach
Oliver Urbann, Stefan Tasse, Autonomous Robots 35.1 (2013) pp. 37–49. Springer US, 2013
Observer-based dynamic walking control for biped robots
Stefan Czarnetzki, Sören Kerner, Oliver Urbann, Robotics and Autonomous Systems 57.8 (2009) pp. 839–845. North-Holland Publishing Co., 2009
Bipedal Walking with Dynamic Balance that Involves Three-Dimensional Upper Body Motion
Jing Liu, Oliver Urbann, Robotics and Autonomous Systems 77 (2016) pp. 39-54. North-Holland Publishing Co., 2016
Conference, Workshop, Symposium
Online Object Tracking on Multiple Cameras with Completely Overlapping Views
Jan-Philip Richter, Sebastian Flores and Oliver Urbann, 2023 IEEE 32nd International Symposium on Industrial Electronics (ISIE), 2023
evoBOT – Design and Learning-based Control of a Two-Wheeled Compound Inverted Pendulum Robot
Patrick Klokowski, Julian Eßer, Nils Gramse, Benedikt Pschera, Marc Plitt, Frido Feldmeier, Shubham Bajpai, Christian Jestel, Nicolas Bach, Oliver Urbann, and Sören Kerner, Intelligent Robots and Systems (IROS), 2023 IEEE/RSJ International Conference on, 2023
A Machine Learning Approach to Minimization of the Sim-To-Real Gap via Precise Dynamics Modeling of a Fast Moving Robot
Alexander Kanwischer, Oliver Urbann, Control Automation Robotics Vision (ICARCV), 2022, finalist for best paper award.
Online and real-time tracking in a surveillance scenario
Oliver Urbann, Oliver Bredtmann, Maximilian Otten, Jan-Philip Richter, Thilo Bauer, David Zibriczky, IEEE International Conference on Robotics and Automation Workshop: Long-Term Human Motion Prediction, 2023, London
Obtaining Robust Control and Navigation Policies for Multi-robot Navigation via Deep Reinforcement Learning
Christian Jestel, Harmtmut Surmann, Jonas Stenzel, Oliver Urbann, Marius Brehler, 7th International Conference on Automation, Robotics and Applications (ICARA), 2021, pp. 48-54
A C Code Generator for Fast Inference and Simple Deployment of Convolutional Neural Networks on Resource Constrained Systems
Oliver Urbann, Simon Camphausen, Arne Moos, Ingmar Schwarz, Sören Kerner, Maximilian Otten, IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), 2020, pp. 1-7, Source code available on GitHub, best presentation award.
Camera Calibration for Color Classification
Oliver Urbann, Dino Menges, Ingmar Schwarz, Stefan Tasse, Jonas Stenzel, 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), 2019, pp. 118-123
An Alternative Derivation of the Linear Inverted Pendulum Model
Oliver Urbann, Ingmar Schwarz, Workshop on Robust Perception, Planning, and Control for Legged Robot Locomotion in Challenging Domains in conjunction with the 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017
Playing Soccer Outdoors with Humanoid Robots
Matthias Hofmann, Arne Moos, Fabian Rensen, Ingmar Schwarz, Oliver Urbann, Proceedings of the 11th Workshop on Humanoid Soccer Robots in conjunction with the 2016 IEEE-RAS International Conference on Humanoid Robots, 2016
Edge Detection Using Streaming SIMD Extensions on Low Cost Robotic Platforms
Matthias Hofmann, Fabian Rensen, Ingmar Schwarz, Oliver Urbann, Proceedings of the 11th Workshop on Humanoid Soccer Robots in conjunction with the 2016 IEEE-RAS International Conference on Humanoid Robots, 2016
A Fall Prediction System for Humanoid Robots Using a Multi-Layer Perceptron
Matthias Hofmann, Ingmar Schwarz, Oliver Urbann, Florian Ziegler, Proceedings of the 10th Workshop on Cognitive Robotics in conjunction with the IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS 2016), 2016
A Reactive Stepping Algorithm Based on Preview Controller with Observer for Biped Robots
Oliver Urbann, Matthias Hofmann, Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on, 2016, pp. 5324–5331
Boundedness Approach to Gait Planning for the Flexible Linear Inverted Pendulum Model
Leonardo Lanari, Oliver Urbann, Seth Hutchinson, Ingmar Schwarz, RoboCup 2016: Robot World Cup XX, 2017, pp. 58-70
Analysis and Compensation of Biped Walking Disturbances Caused by Model Abstractions
Oliver Urbann, Jan Hendrik Berlin, Matthias Hofmann, Ingmar Schwarz, Proceedings of the 10th Workshop on Humanoid Soccer Robots in conjunction with the 2015 IEEE-RAS International Conference on Humanoid Robots, 2015, Seoul, Korea
Flexible Linear Inverted Pendulum Model for Cost-Effective Biped Robots
Oliver Urbann, Ingmar Schwarz, Matthias Hofmann, Humanoid Robots (Humanoids), 2015 15th IEEE-RAS International Conference on, 2015, pp. 128–131. Downloadable source code.
Modification of Foot Placement for Balancing Using a Preview Controller Based Humanoid Walking Algorithm
Oliver Urbann, Matthias Hofmann, RoboCup 2013: Robot World Cup XVII, 2014, pp. 420–431
Rigid and Soft Body Simulation Featuring Realistic Walk Behaviour
Oliver Urbann, Sören Kerner, Stefan Tasse, RoboCup 2011: Robot Soccer World Cup XV, 2012, pp. 126–136. Downloadable source code.
Applying Dynamic Walking Control for Biped Robots
Stefan Czarnetzki, Sören Kerner, Oliver Urbann, RoboCup 2009: Robot Soccer World Cup XIII, 2010, pp. 69–80
A Robust And Calibration-Free Vision System for Humanoid Soccer Robots
Ingmar Schwarz, Matthias Hofmann, Oliver Urbann, Stefan Tasse RoboCup 2015: Robot World Cup XIX, 2016, to appear
Stable walking of a bipedal humanoid robot involving three-dimensional upper body motion
Jing Liu, U. Schwiegelshohn, O. Urbann, Humanoid Robots (Humanoids), 2014 14th IEEE-RAS International Conference on, 2014, pp. 80–85
Walking pattern generation involving 3D waist motion for a biped humanoid robot
Jing Liu, O. Urbann, Control Automation Robotics Vision (ICARCV), 2014 13th International Conference on, 2014, pp. 462–467
On Sensor Model Design Choices for Humanoid Robot Localization
Stefan Tasse, Matthias Hofmann, Oliver Urbann, RoboCup 2012: Robot Soccer World Cup XVI, 2013, pp. 380–390
SLAM in the Dynamic Context of Robot Soccer Games
Stefan Tasse, Matthias Hofmann, Oliver Urbann, RoboCup 2012: Robot Soccer World Cup XVI, 2013, pp. 368–379
Multi Body Kalman Filtering with Articulation Constraints for Humanoid Robot Pose and Motion Estimation
Daniel Hauschildt, Sören Kerner, Stefan Tasse, Oliver Urbann, RoboCup 2011: Robot Soccer World Cup XV, 2012, pp. 415–426
Efficient Multi-hypotheses Unscented Kalman Filtering for Robust Localization
Gregor Jochmann, Sören Kerner, Stefan Tasse, Oliver Urbann, RoboCup 2011: Robot Soccer World Cup XV, 2012, pp. 222–233
Contact

Please feel free to ask me any question related to my research topics. I will try my best to help you. You can also have a look at my various other social network accounts.